
Sommario:
- Autore John Day day@howwhatproduce.com.
- Public 2024-01-30 10:00.
- Ultima modifica 2025-01-23 14:49.


Questo circuito è un driver a pendolo.
Il motore può girare in senso orario e antiorario a seconda della direzione della corrente.
Puoi vedere il circuito in funzione nel video.
Forniture
Componenti: induttori - 2 (clicker, bobina grande o relè), resistori (mostrati nel circuito), fonte di alimentazione (due batterie da 9 V di una batteria da 12 V), diodi ad alta potenza - 2, scheda di cartone o matrice, fili, 1 mm filo metallico, saldatura, fili isolati, transistor BJT NPN di potenza - 2, dissipatori di calore - 2, transistor NPN e PNP per uso generale - 5, involucro (scatola di cartone o plastica).
Strumenti: spellafili, forbici, pinze, saldatore.
Strumenti opzionali: oscilloscopio USB, multimetro.
Passaggio 1: progettare il circuito

Ho disegnato il circuito con il vecchio software di simulazione PSpice per ridurre i tempi di disegno del circuito.
Un induttore scaricato ideale è inizialmente un circuito aperto. Dopo pochi secondi o millisecondi l'induttore è completamente carico. (gli induttori più grandi richiedono più tempo per caricarsi) l'induttore diventa equivalente a un cortocircuito. Puoi ridurre il tempo di carica aumentando la resistenza che viene "vista" dall'induttore o aumentando la corrente di carica:
Vl(t) = L*di(t)/dt
L'uscita del transistor può essere modellata come una sorgente di corrente, fornendo una corrente costante all'induttore di carica. I diodi sono utilizzati per scaricare i due induttori e limitare la tensione massima attraverso gli induttori di scarica.
I transistor Q1a e Q2a fanno il circuito buffer e il transistor Q1b è un inverter. Clicca sul seguente link per vedere un circuito simile:
hackaday.io/page/6956-silly-robot
Passaggio 2: simulazioni



Ho usato il software PSpice che permette simulazioni veloci.
Puoi vedere le tensioni dell'induttore di carica e scarica (mostrate nel primo grafico).
Puoi anche vedere che la corrente massima del motore è 20 mA (mostrata nel secondo grafico).
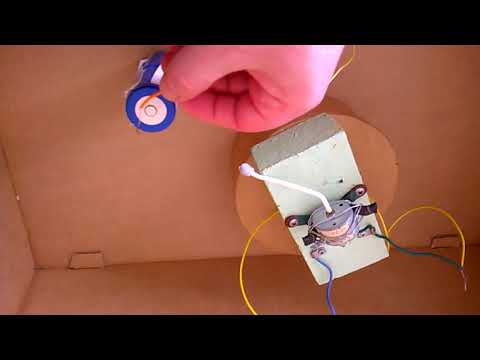
Passaggio 3: crea il circuito

Ho fatto solo il driver del motore. Non ho fatto il buffer e l'inverter.
Ho implementato il circuito con due vecchi diodi sovietici.
Ho usato due resistori ad alta potenza da 10 ohm che fanno 5 ohm quando collegati in parallelo.
Le bobine sono state realizzate con due clicker di un vecchio apparecchio.
Passaggio 4: inserire il circuito all'interno della scatola

Ho usato una vecchia scatola regalo come rivestimento.
Passaggio 5: test

Ho testato il circuito con due batterie da 9 V e alimentazione da 15 V.
Consigliato:
Pendolo elettromagnetico: 8 passaggi (con immagini)
")
Pendolo elettromagnetico: alla fine degli anni '80 ho deciso che mi sarebbe piaciuto costruire un orologio interamente in legno. All'epoca non c'era Internet, quindi era molto più difficile fare ricerche di quanto non lo sia oggi… anche se sono riuscito a mettere insieme una ruota molto rozza
Péndulo Inteligente De Newton Con Electricidad (Pendolo di Newton con elettricità): 17 passi (con immagini)
: 17 passi (con immagini)")
Péndulo Inteligente De Newton Con Electricidad (Newton´s Pendulum With Electricity): Este proyecto lo hice con un fin educativo, ya que resulta curioso e hipnotizante la manera en que fluye la electricidad por medio de los bombillos. Pienso que es una buena Herramienta para enseñar a las personas el principio del Péndu
Pendolo invertito: teoria e dinamica del controllo: 17 passaggi (con immagini)
")
Pendolo invertito: teoria e dinamica del controllo: Il pendolo invertito è un problema classico della dinamica e della teoria del controllo che viene generalmente elaborato nei corsi di fisica o matematica delle scuole superiori e universitari. Essendo io stesso un appassionato di matematica e scienze, ho deciso di provare a implementare i concetti
JustAPendulum: pendolo digitale open source: 13 passaggi

JustAPendulum: pendolo digitale open source: JustAPendulum è un pendolo open source basato su Arduino che misura e calcola il periodo di oscillazione per trovare l'accelerazione gravitazionale della Terra (~9,81 m/s²). Contiene un Arduino UNO fatto in casa che utilizza un adattatore da USB a seriale per com
Progetto orologio a pendolo: 4 passaggi

Progetto Orologio a Pendolo: sono un membro del Cluster 2 in COSMOS 2018 all'UC San Diego. Il nostro cluster si concentra sulla progettazione ingegneristica e sul controllo delle sculture cinetiche. Il nostro primo progetto è stato quello di creare un orologio a pendolo utilizzando lo studio di design della UCSD. Questo progetto è anche uno degli UCSD