: 5 passaggi")
Sommario:
- Autore John Day day@howwhatproduce.com.
- Public 2024-01-30 10:04.
- Ultima modifica 2025-01-23 14:50.


Benvenuti in un nuovo progetto!!!
Per prima cosa volevo davvero fare degli occhi inquietanti come fanno per i costumi e Halloween. Amo gli effetti speciali e volevo imparare e costruire i miei occhi animatronici usando un arduino, servi e palline da ping pong.
Passo 1:
Raccogliere rifornimenti…
2 servomotori (sono andato con il più economico possibile in un negozio Hobby Town)
arduino uno (adafruit)
tiranti (Hobby Town)
2 semiassi (Hobby Town)
2 palline da ping pong
connettori (Hobby Town)
Testa di polistirolo (Michaels)
altri articoli vari…
Passaggio 1: Passaggio 2: dipingere gli occhi


Per il passaggio 2 volevo andare avanti e dipingere i bulbi oculari che ho fatto io stesso. Sì, sono leggermente storte ma da lontano stanno benissimo! Se hai domande su quale vernice ho usato, commenta qui sotto e chiedi:)
Fare gli occhi:
Materiale necessario:
4 pennelli piccoli e sottili
dipingere
tovagliolo di carta
Per fare gli occhi si comincia con due palline da ping pong e onestamente le si taglia a metà con un coltellino esatto o un taglierino. Quindi dipingili prima con una base bianca per nascondere eventuali imperfezioni. Dopodiché inizia a stratificare il colore degli occhi che stai cercando di ottenere. Per il mio ho usato il verde e il blu. La mia tavolozza di colori era verde, blu, bianco e nero.
Passaggio 2: Passaggio 3: mettere insieme la base


Passaggio 3: mettere insieme la base
Materiale necessario:
fogli acrilici
pezzo di metallo casuale
viti
semiassi
sega a nastro (non necessaria)
Per prima cosa ho ritagliato la forma e le dimensioni che volevo da un foglio acrilico. Ho quindi ritagliato le staffe metalliche solo da un pezzo di metallo di scarto. Una volta che ho ottenuto quelli dove li volevo, ho praticato i fori per le viti e collegato le staffe alla base come mostrato sopra nell'immagine. Per uno dei miei servi ho dovuto ritagliare una piccola forma rettangolare per assicurarmi che si adattasse lì dentro. Questo era per assicurarsi che i collegamenti e tutto fosse allineato correttamente.
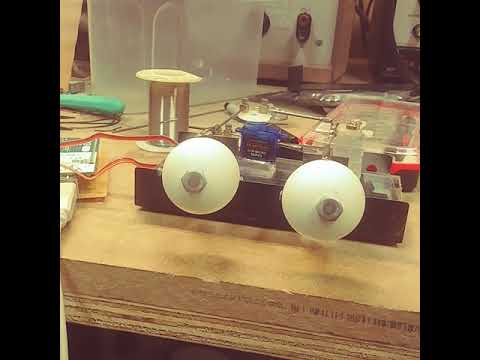
Passaggio 3: Passaggio 4: Posizionamento di servi e collegamenti



Fase 4: Posizionamento di servi e collegamenti
Materiale necessario:
2 servi
collegamenti
quadrati acrilici tagliati piccoli
viti
connettori
Per il passaggio 4 ho posizionato dove andrà tutto e l'ho disposto. Per assicurarmi che tutto fosse seduto in modo uniforme e ho insegnato che ho dovuto posizionare piccoli pezzi ritagliati di acrilico sotto uno dei servi. Ho dovuto mettere la stessa quantità di pezzi sotto il collegamento che collega l'occhio al servo. Dopo che questi sono tutti posti e incollati (qualunque sia la tua scelta, purché si attacchi) puoi collegare gli occhi ai collegamenti e ai servi. Un primo piano di questo è mostrato sopra nell'immagine 4. Solo una nota a margine quando si posizionano i servi e i collegamenti il servo più vicino agli occhi deve essere sollevato così come il collegamento direttamente accanto ad esso. Questo perché uno tira sull'asse x e l'altro tira sull'asse y. Questo è il passo più grande e alcune cose potrebbero dover essere ottimizzate anche dopo aver finito di collegare tutto.:)
Passaggio 4: CODICE PASSAGGIO


Aggiunta del codice all'arduino!! Posto sopra sono le immagini del codice utilizzato per questi occhi. Ho aggiunto un joystick da un controller PS1 per controllare gli occhi.
Passaggio 5: Passaggio 5: la testa




Questo passaggio è facoltativo e richiede tempo.
Passaggio 5: fare la testa
Materiale necessario
Testa di polistirolo
coltello esatto
pistola per colla a caldo
Ora per questo passaggio è facoltativo e ha richiesto tempo. Probabilmente mi ci sono volute 2 ore. Sfortunatamente il mio complice ha accidentalmente abbandonato il progetto e si è rotto la testa dopo che avevo finito. Ad ogni modo, per questo ho appena capito quanto in profondità dovevo ritagliare dal basso e dall'alto. La parte più importante sono gli occhi, hanno bisogno di abbastanza spazio per muoversi e andare in cerchio, come puoi vedere nella foto 5. La base acrilica che ho scelto di fare sporgeva lateralmente come puoi vedere nella foto 6. Questo può essere coperto da paraorecchie o qualcosa di divertente come una parrucca!
Allora TADDAAAAAA!!!!!! hai completamente finito con questo progetto.
Spero che ti piaccia e commenta qui sotto se hai domande o qualsiasi cosa chiedi pure:)
Consigliato:
Come far funzionare i servomotori utilizzando Moto:bit con Micro:bit: 7 passaggi (con immagini)
")
Come eseguire i servomotori utilizzando Moto:bit con Micro:bit: Un modo per estendere la funzionalità del micro:bit è utilizzare una scheda chiamata moto:bit di SparkFun Electronics (circa $ 15-20). Sembra complicato e ha molte funzioni, ma non è difficile far funzionare i servomotori da esso. Moto:bit ti permette di
Occhi animatronici con telecomando: 5 passaggi

Occhi animatronici con telecomando: questa è un'istruzione su come creare occhi animatronici che possono essere controllati a distanza dal computer tramite WiFi. Utilizza componenti elettronici minimi, nessun PCB e richiede una saldatura minima. Puoi controllarlo dalla tastiera del PC, quindi non hai bisogno di un e
Maschera King Kong con occhi animatronici: 4 passaggi (con immagini)
")
Maschera King Kong con occhi animatronici: questa guida mostra come realizzare una maschera con occhi in movimento realistici
Controllo di 3 servomotori con 3 potenziometri e un Arduino: 11 passaggi (con immagini)
")
Controllo di 3 servomotori con 3 potenziometri e un Arduino: ciao. Questo è il mio primo istruibile, quindi spero che sarai paziente con me se commetto errori nell'impostarlo. È scritto per i principianti, quindi i più avanzati tra di voi possono saltare un sacco di questo e arrivare solo a cablarlo. L'obiettivo che mi sono prefissato
Robot umanoide basato su Arduino che utilizza servomotori: 7 passaggi (con immagini)
")
Robot umanoide basato su Arduino che utilizza servomotori: Ciao a tutti, questo è il mio primo robot umanoide, realizzato con un foglio di schiuma di PVC. È disponibile in vari spessori. Qui, ho usato 0,5 mm. Al momento questo robot può semplicemente camminare quando l'ho acceso. Ora sto lavorando per connettere Arduino e Mobile tramite Bluetooth